


طوّر فريق بحثي من معهد ماساتشوستس للتكنولوجيا (MIT) نظاماً ذكياً جديداً يمكّن الروبوتات من إنشاء خرائط ثلاثية الأبعاد دقيقة خلال ثوانٍ فقط، ما يفتح آفاقاً واعدة في عمليات الإنقاذ أثناء الكوارث الطبيعية وحوادث الانهيار.
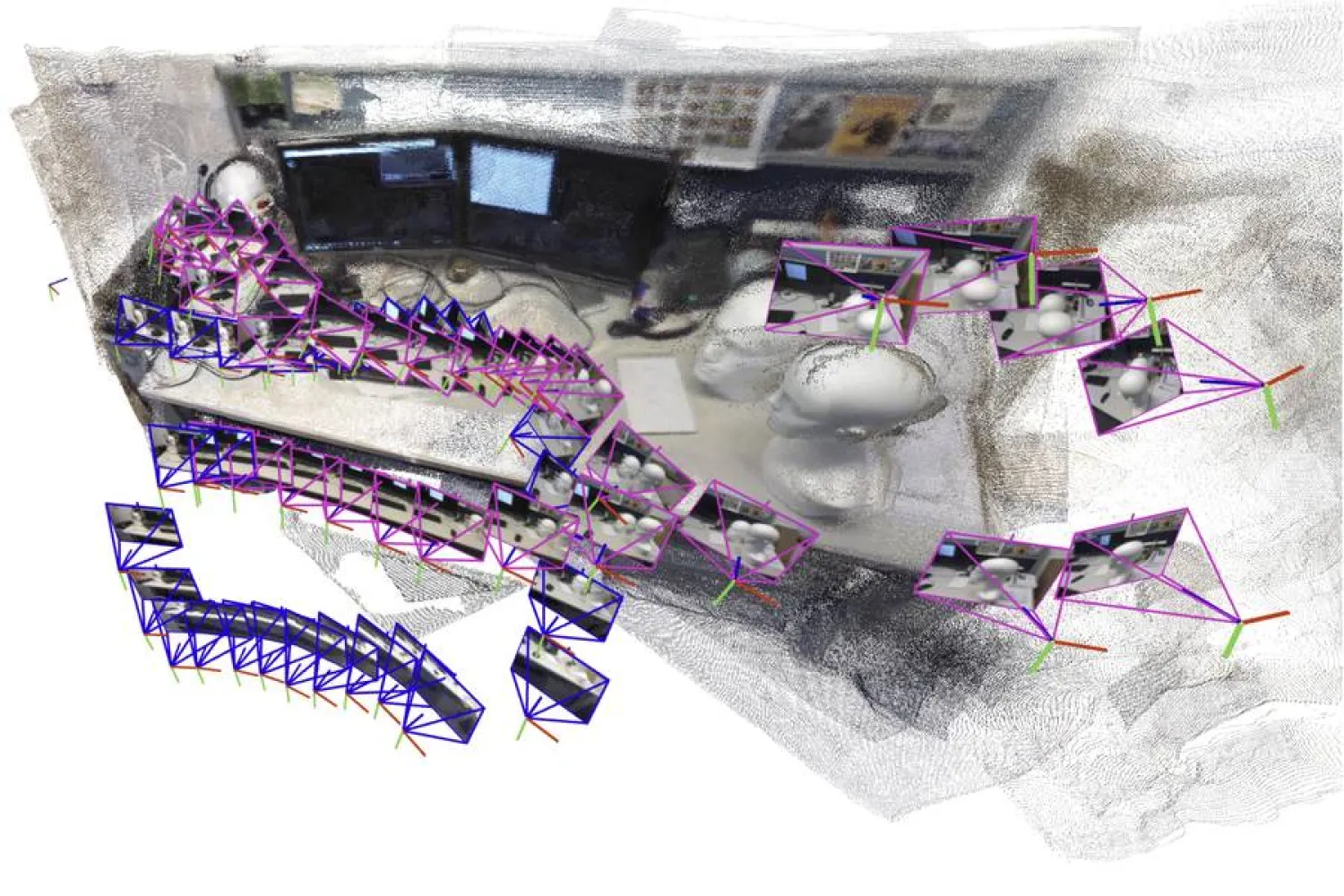
الابتكار الجديد يعتمد على الذكاء الاصطناعي لتسريع ما يُعرف بعملية «التوطين ورسم الخرائط المتزامن» (SLAM)، وهي التقنية التي تسمح للروبوت بتحديد موقعه أثناء رسم خريطة للبيئة المحيطة به في الوقت نفسه. وبدلاً من بناء الخريطة دفعة واحدة، يقوم النظام بإنشاء «خرائط فرعية صغيرة» تُدمج تدريجياً لتكوين خريطة ثلاثية الأبعاد متكاملة في الزمن الحقيقي.




ويؤكد الباحث دومينيك ماجّو، قائد الفريق، أن الهدف هو «تمكين الروبوتات من أداء مهام معقدة دون تعقيد عملية إعداد الخرائط»، موضحاً أن النظام يمكن تشغيله بسهولة وبدون أجهزة باهظة الثمن أو معايرة معقدة.
أما المشرف على المشروع البروفيسور لوكا كارلوني، فيشير إلى أن الدمج بين تقنيات الرؤية العميقة والأساليب الهندسية الكلاسيكية «أنتج نموذجاً بسيطاً وفعالاً» يمكن توظيفه في مجالات عديدة، من البحث عن ناجين تحت الأنقاض إلى استكشاف الأنفاق والمناجم المتضررة.
وأظهرت التجارب أن النظام قادر على إنتاج خرائط شبه فورية بدقة تقل عن 5 سنتيمترات باستخدام لقطات قصيرة من كاميرات عادية، متفوقاً بذلك على النماذج السابقة من حيث السرعة والجودة.
ويعمل الباحثون حالياً على تطوير النسخة المقبلة لتتحمل ظروفاً أكثر قسوة، وتُستخدم في بيئات معقدة كالأنفاق أو المباني المنهارة.
بدعم من المؤسسة الوطنية للعلوم ومكتب الأبحاث البحرية الأميركي ومؤسسة الأبحاث الكورية، يشكّل هذا النظام خطوة مهمة نحو جيل جديد من الروبوتات الذكية القادرة على “رؤية” العالم وبنائه رقمياً في لحظة — لتتحول التقنية من المختبر إلى ميادين الإنقاذ الحقيقي.


